


�l(f��)�ǿ��ŷ��(q��)��(d��ng)���S���������}��
�(q��)��(d��ng)��ͬ�r(sh��)���F(xi��n)OV��TG��(b��o)���Ĺ��ϾS��
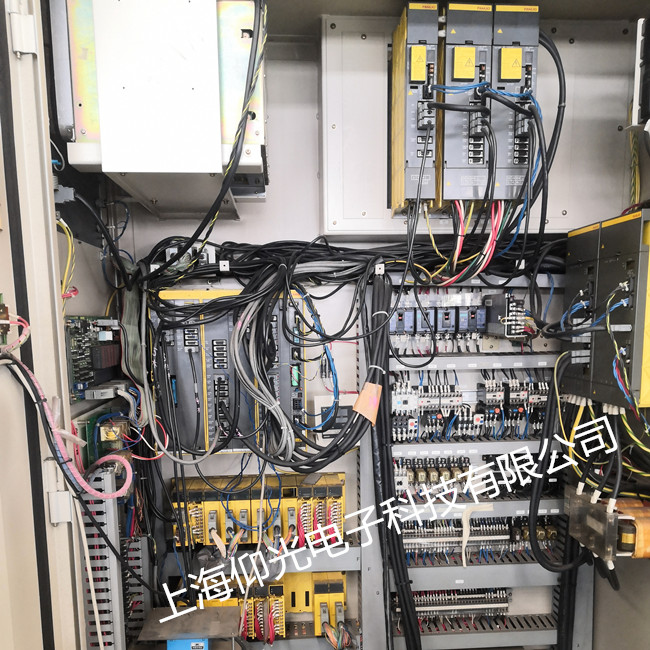
���ϬF(xi��n)��һ�_(t��i)����FANUC 0TE-A2ϵ�y(t��ng)�Ĕ�(sh��)��܇����X�S�\(y��n)��(d��ng)�r(sh��)���F(xi��n)ALM401��(b��o)����
�����c̎���^�̣��z���(b��o)���r(sh��)X�S�ŷ��(q��)��(d��ng)��PRDYָʾ��������OV��TG�Ɉ�(b��o)��ָʾ��ͬ�r(sh��)����CRT���@ʾALM401̖(h��o)��(b��o)������늺�NC��������(d��ng)����X�S��/ؓ(f��)���\(y��n)��(d��ng)�I�������_(t��i)�\(y��n)��(d��ng)�����s2~3s���ֳ��F(xi��n)ALM401̖(h��o)��(b��o)�����(q��)��(d��ng)����(b��o)����׃��
�l(f��)�ǿ��ŷ��(q��)��(d��ng)���S�����l(f��)�ǿ�(FANUC)ϵ��5ϵ�y(t��ng)��0ϵ�y(t��ng)��7ϵ�y(t��ng)��15ϵ�y(t��ng)��18ϵ�y(t��ng)�ȣ� b. �l(f��)�ǿƣ�FANUC��0i/0i Mate C(B)ϵ�У� c.�l(f��)�ǿƣ�FANUC��16i/18i/21i-MODEL Bϵ�У� d.�l(f��)�ǿƣ�FANUC��NC���������ŷ��Ŵ������ŷ��Դ�����ư塢�ΉK�����·�壨���塢CPU�塢�װ塢��塢�Դ�塢MAIN�塢I/O�塢AXIS �塢SPIF�塢CRT�塢PMC�塢FSRM�塢SRAM�塢DRAM�塢PSU�Դ�壩�ȣ�

�ŷ��(q��)��(d��ng)����Ҋ���ϾS��̎��������
̎��������ԭ��:�^����Ƿ������·���^�ᡢ�(q��)��(d��ng)����ֹ��HALL�oЧ��
5늙C(j��)ʧ��
����ԭ��һ���ٶȷ����ĘO�Ը��e(cu��)��
̎�����������ԇLԇ���·�����
a.������ܣ���λ�÷����O���_�P(gu��n)����һλ�á�(ijЩ�(q��)��(d��ng)���Ͽ���)
b.��ʹ�Üy(c��)�ٙC(j��)�����(q��)��(d��ng)���ϵ�TACH+��TACH-��(du��)�{(di��o)���롣
c.��ʹ�þ��a�������(q��)��(d��ng)���ϵ�ENCA��ENCB��(du��)�{(di��o)���롣
d.����HALL�ٶ�ģʽ�£����(q��)��(d��ng)���ϵ�HALL-1��HALL-3��(du��)�{(di��o)���ٌ�Motor-A��Motor-B��(du��)�{(di��o)�Ӻá�
����ԭ��������a���ٶȷ����r(sh��)�����a���Դʧ늡�
̎���������z���B��5V���a���Դ���_��ԓ�Դ���ṩ�����������ʹ���ⲿ�Դ���_��ԓ늉��nj�(du��)�(q��)��(d��ng)����̖(h��o)�صġ�
6늙C(j��)��һ��(g��)�����ϱ���һ��(g��)�����ܵÿ�
����ԭ��һ���oˢ늙C(j��)����λ���e(cu��)��
̎���������z�y(c��)�������_����λ��
����ԭ������ڲ����ڜy(c��)ԇ�r(sh��)���y(c��)ԇ/ƫ���_�P(gu��n)���ڜy(c��)ԇλ�á�
̎�����������y(c��)ԇ/ƫ���_�P(gu��n)����ƫ��λ�á�
����ԭ������ƫ���λ��λ�ò����_��
̎�������������O(sh��)����
1.��(sh��)�����壺���ں��Ŀ��ơ��\(y��n)�㡢�惦(ch��)���ŷ����Ƶȡ������弯����PLC���ܡ�
2.PLC�壺���������(d��ng)�����ơ���ϵ�y(t��ng)��PLC���ѽ�(j��ng)�͔�(sh��)�����弯�ɵ�һ��
3.I/O�壺���ڵ�I/O�����ڔ�(sh��)��ϵ�y(t��ng)���ⲿ���_�P(gu��n)��̖(h��o)���Q�����͵�I/O����Ҫ�������@ʾ�ӿڡ��I�P�ӿڡ���݆�ӿڡ��������ӿڼ�RS232�ӿڵȡ�
4��MMC�壺�˙C(j��)�ӿڰ塣�@�ǂ�(g��)����X���İ忨�����DZ��ƥ��ġ����펧��CRT����(bi��o)��(zh��n)�I�P��ܛ�(q��)�����(bi��o)���惦(ch��)�������С����нӿڡ�
5.CRT�ӿڰ壺�����@ʾ���ӿڡ���ϵ�y(t��ng)�У�CRT�ӿڱ����ɵ�I/O���ϡ�
���⣬߀�ṩ����һЩ���x�忨�ȡ�
�D(zhu��n)�dՈ(q��ng)ע����̎���Ϻ�������ӿƼ����I(y��)�ŷ��(q��)��(d��ng)���S��,�ŷ�늙C(j��)�S��
����朽ӣ�http://7588518.cn/fuwu/Services_Show2451.htm
�ŷ��(q��)��(d��ng)���S�� �ŷ�늙C(j��)�S�� �|�����S�� ׃�l���S��
�Ԓ��021-50157782
�֙C(j��)��13817011982 ��̖ͬ(h��o)
�]�䣺shygdzi@163.com
(li��n)ϵ�ˣ�����
�W(w��ng)ַ��http://7588518.cn
�� �҂��_���Üy(c��)ԇ�ýo�͑�����������
��һƪ���¸��ŷ�늙C(j��)��Ҋ�ӵع��ϾS����
